I. Introduction
Stepper motors are vital factors in numerous electromechanical systems, offering precise control over rotational movement. These motors are distinctive for their capability to divide a full gyration into a series of separate ways, making them ideal for operations taking accurate positioning and speed control. Understanding the mechanics behind stepper motors is pivotal for masterminds and suckers likewise, as it enables optimized application and integration within colorful technologies. By unraveling the complications of stepper motor operation, individualities can harness their capabilities more effectively, leading to enhanced performance and functionality in different fields ranging from robotics to artificial robotization.

II. Basics of Stepper Motors
A. Definition and purpose
Stepper motors are electromechanical devices designed to convert electrical pulses into precise mechanical motion. Unlike conventional motors, which continuously rotate, stepper motors move in discrete steps, offering exceptional control over position and speed. Their unique operation makes them invaluable in applications requiring accurate positioning, such as 3D printers, CNC machines, and robotic systems. By providing precise control over movement, stepper motors enable the execution of complex tasks with unparalleled accuracy and repeatability, driving innovation across industries.
B. Components: rotor, stator, and phases
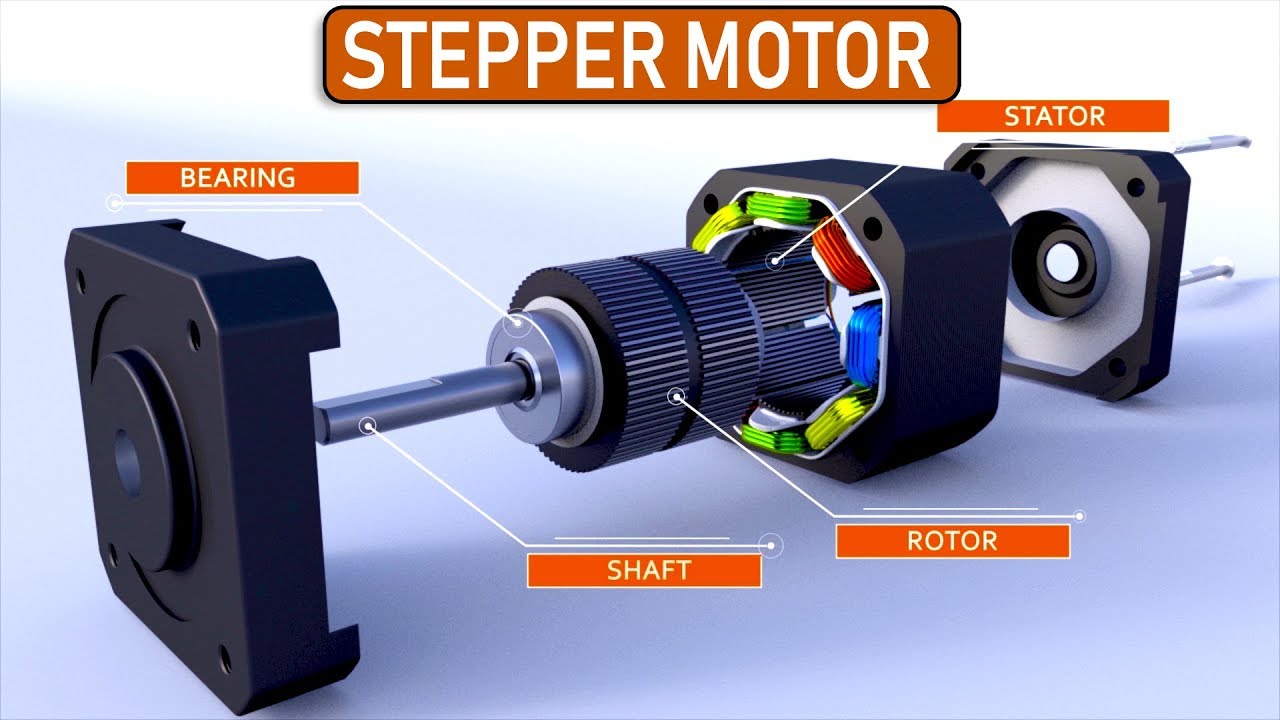
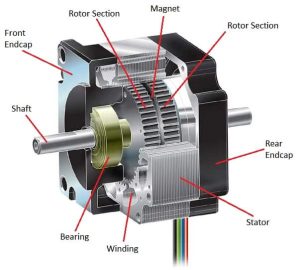
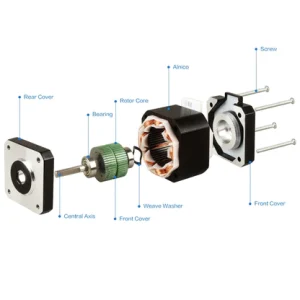
The fundamental components of a stepper motor include the rotor, stator, and phases. The rotor is the moving part of the motor, typically containing permanent magnets or toothed gear mechanisms. Surrounding the rotor is the stator, which houses coils of wire arranged in discrete phases. These phases interact with the rotor’s magnetic field to generate motion. By energizing the coils in a specific sequence, the motor can step through predetermined increments, enabling precise control over rotation and position.
C. Operating principles: steps and phases
Stepper motors operate based on the principles of steps and phases. Each step represents a discrete movement of the motor’s shaft, typically measured in degrees. The number of steps per revolution determines the motor’s resolution and precision. Phases refer to the energized coils within the motor’s stator. By energizing the phases in a specific sequence, the motor produces a rotating magnetic field that interacts with the rotor, causing it to move in discrete steps. This precise control over phases and steps allows stepper motors to achieve accurate and repeatable motion control in various applications.
III. Understanding Step Sequencing
A. Explanation of step sequences
Step sequencing in stepper motors refers to the order in which the motor’s phases are amped to produce a stir. The sequence determines the direction and magnitude of movement, allowing precise control over the motor’s gyration. Common step sequences include full-step, half-step, and micro-stepping, each in varying situations of resolution and smoothness. By precisely orchestrating the sequence of phase energization, stepper motors can achieve accurate positioning and smooth stir in a wide range of operations, from 3D printing to robotic manipulation.
B. Half-step vs. full-step operation
In half-step operation, the stepper motor moves through half of its angular step size for each step signal received. This results in twice the number of steps per revolution compared to full-step operation, effectively doubling the motor’s resolution. While half-step operation offers finer control and smoother motion, it may sacrifice torque and holding strength due to reduced current flow in the motor windings. Conversely, a full-step operation provides greater torque and holding power but with a coarser resolution. The choice between half-step and full-step operation depends on the specific requirements of the application.
C. Role of step angle
The step angle of a stepper motor defines the angular displacement produced by each step signal. It is determined by the construction of the motor and typically ranges from 0.9° to 90° per step. Smaller step angles result in finer resolution and smoother motion but may require more complex control electronics. Larger step angles offer greater torque but may result in less precise positioning. The selection of an appropriate step angle depends on factors such as the desired resolution, torque requirements, and mechanical characteristics of the system being controlled. Understanding the role of step angle is essential for optimizing the performance of stepper motors in various applications.
IV. Working Mechanism
A. Magnetic fields and rotor movement
Stepper motors operate based on the interaction between magnetic fields and the motor’s rotor. The stator, which contains coils of wire arranged in phases, generates a rotating magnetic field when energized with electrical current. This magnetic field interacts with the permanent magnets or rotor teeth of the motor, causing the rotor to align itself with the magnetic field. By sequentially energizing the stator coils, the magnetic field rotates, inducing step-by-step movement in the rotor. This precise control over magnetic fields enables stepper motors to achieve accurate and repeatable motion control in various applications.
B. Control signals and phase energization
The movement of a stepper motor is controlled by supplying specific sequences of electrical pulses to its stator coils. Each pulse corresponds to a step, causing the motor to move a predetermined distance. The sequence in which the coils are energized determines the direction of rotation and the magnitude of movement. By controlling the timing and duration of these pulses, stepper motors can achieve precise positioning and speed control. This method of phase energization, combined with precise control signals, allows stepper motors to execute complex motions with high accuracy and repeatability.
C. Direction control and rotation
Direction control in stepper motors is achieved by reversing the sequence of phase energization. By changing the order in which the coils are amped, the motor can rotate in either clockwise or counterclockwise directions. Also, the speed of gyration can be controlled by adjusting the frequency of the control signals supplied to the motor. This inflexibility in direction and speed control makes stepper motors well-suited for operations requiring precise positioning and a reversible stir. Whether used in robotics, robotization, or other fields, stepper motors offer dependable and effective gyration control for a wide range of operations.
V. Applications
A. Common uses in various industries
Stepper motors find expansive applications across different disciplines due to their precise stir control capabilities. In manufacturing, they’re employed in CNC machines for precise tool positioning and 3D printers for subcaste-by-subcaste fabrication. In the automotive sector, stepper motors drive energy injectors, throttle control, and HVAC systems, improving machine performance and climate control. They’re also current in medical biases like infusion pumps and individual outfits, where delicacy and trustability are consummate. Also, stepper motors are integral to consumer electronics, robotics, and aerospace diligence, powering bias ranging from camera lenses to satellite positioning systems.
B. Advantages and limitations
Stepper motors offer several advantages, including precise positional control, high torque at low speeds, and simplicity of control. They operate in an open-loop system, eliminating the need for complex feedback mechanisms. However, they also have limitations. Stepper motors may experience resonance issues at certain speeds, leading to reduced accuracy and vibration. They can also suffer from heat buildup during prolonged operation, potentially affecting performance and lifespan. Furthermore, stepper motors may lack the efficiency and speed capabilities of other motor types, like servo motors, limiting their suitability for high-speed or high-torque applications.
C. Emerging trends and innovations
In recent times, advancements in stepper motor technology have led to several inventions and rising trends. One notable trend is the relinquishment of mongrel stepper motors, which combine the advantages of traditional stepper motors with better performance characteristics, similar to an advanced necklace and smoother operation. Another trend is the integration of stepper motors with advanced control algorithms and feedback mechanisms, enhancing delicacy and dynamic performance. Also, miniaturization and integration of stepper motor factors have enabled their use in compact and movable bias, opening up new possibilities in wearable technology, IoT bias, and medical implants. As technology continues to evolve, stepper motors are anticipated to play a decreasingly vital role in driving invention across colorful diligence.
VI. Conclusion
In conclusion, stepper motors stand as necessary factors in ultramodern electromechanical systems, offering precise control over stir in a wide array of operations. Their capability to divide rotational movement into separate ways enables unequaled delicacy and repetition, making them inestimable in diligence ranging from manufacturing to medical bias. Despite their advantages, stepper motors do have limitations, including resonance issues and heat buildup, which must be considered in design and perpetuation. Still, ongoing advancements in technology, similar to cold-blooded motor designs and integrated control algorithms, pledge to address these limitations and further expand the capabilities of stepper motors. Similar to this, the future holds promising openings for the continued elaboration and application of stepper motors across different fields, driving invention and effectiveness in numerous operations.